深圳市弘風科技有限公司
Language:
 ∷
∷

∷
∷

無論什么樣的電機,控制方法和其結構是息息相關的。我們知道按一定的順序給步進電機的各相輪流通電,這樣步進電機才能轉動起來。這就是控制電機應該知道的第一個知識點:電機運行時,各相通電需要滿足一定的時序。第二個知識點就是力矩的概念,電機力矩的大小和繞組數量、通電電流大小有關。
那么什么是細分控制呢?細分控制的原理又是什么呢?步進電機之所以能實現步進就是因為在硬件結構上做了拆分(定子上有不同的通電相,轉子上有齒),使其一次轉動不是一圈,而是一步一步的按固定的角度轉動。這一步所轉過的角度就是步距角。步距角是步進電機的固有屬性,每一個步進電機的步距角在設計完成之后就是固定的。步距角和電機運行的拍數以及轉子齒數有關,θ=360/NZ(2相電機的計算公式,本文例子全部以兩相電機為例),N是拍數(一般可以通過線數來確定),Z是轉子的齒數。細分控制是指對步距角再進行詳細的分步控制。例如,對一個步距角為1.8°的兩相四拍電機進行四細分控制,就是使得電機轉動一步是1.8除以4,也就是0.45°來運轉。
對于步進電機來說細分功能完全是由外部驅動電路精確控制電機的相電流產生的,和具體電機無關。下面通過對比圖來詳細說明一下。

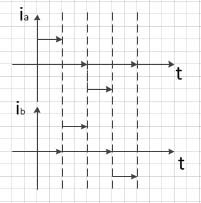
這個是步進電機在整步運行時的電流圖。圖里展示了ab相電流的加載時序A->B->A’->B’->A。
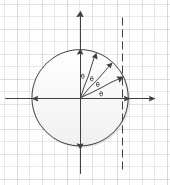
這個是步進電機在4細分時的合成電流圖。90°平均分成了四份,但是合成電流的大小一直保持不變。
用一句話總結就是:通過等角度有規律的插入大小相等的電流合成向量,從而減小合成磁勢的角度(步距角),從而達到細分的目的。
這里保持合成電流的大小相等就是為了保證合成力矩的大小相等,合成力矩相等,電機的運行步數增加,從而實現電機運行穩定性的提高。這里有點類似于用微分發求不規則圖形的面積。那是不是說我無限細分就能做到步進電機運行的完美無缺呢?理論上是這樣的,實際上細分數和電機本身的硬件條件是有關的,電機轉子上的齒數不可能無限多,通電相數也是有限的。只能說細分數越高的電機,控制就能越精確。
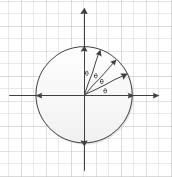
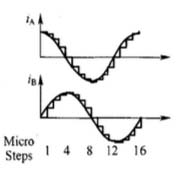
接著我們來具體分析這幾個關鍵詞。第一個就是等角度,等角度就是將步距角平均分成幾份。4細分就是平均分成4份,我們同樣以2相4拍步進電機為例,它的步距角是1.8°,4細分之后它運行一步就是0.45°。第二個是有規律,有規律的意思是每加一步,運行過的角度就增加0.45度。第三個是大小相等的電流合成向量。我們把ia當成x軸ib當成y軸來看,合成電流的大小不變,
那么ia=i0*cosθ,ib=i0*sinθ(參考圖中添加的虛線)。i0是合成電流的大小,這個合成電流的大小和電機的力矩大小有關。這里我們理解的時候可以簡單把i0看成是固定的已知量。
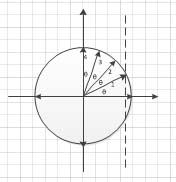
合成電流2的夾角為θ+θ,合成電流3的夾角為θ+θ+θ。這樣通過公式結合時序我們就知道a相在什么時間通多大電流,b相在什么時間通多大電流才能保證步進電機按我們設計好的細分數正常工作。
前一篇: 步進電機指標及專業術語介紹
后一篇: 步進電機驅動器細分和不細分的區別




